

Stemme page 9 - La Propulsion

Pour cette phase cruciale, un troisième personnage entre en lisse. Il s’agit de Jean-Yves ROUSSEAU, notre trésorier au club, et qui est aussi électronicien. Cet homme sait tout faire : Des cartes électroniques, des repas de roi (voir VVM 2006 à Teillé), des encaissements de licences.
L’aventure du Stemme lui plait, et sa double casquette (Il en a d’autres) de modéliste et de concepteur électronique va s’avérer très précieuse. Sans Jean- Yves, je ne sais pas où en serait le Stemme aujourd’hui. Merci Jean-Yves.
Bien entendu, nous souhaitons reproduire la propulsion très particulière du Stemme grandeur.
Les fonctions principales sont :
-Ouverture du nez.
-Mise en route progressive du moteur entraînant le déploiement des pales par la force centrifuge.
-Coupure moteur.
-Arrêt progressif du moteur entraînant le repliement des pales sur le porte pales.
-Indexage
-Fermeture du nez.
Pour gérer l’ensemble des fonctions de la propulsion, et des sécurités associées, Il est décidé les points suivants :
- L’enchaînement des fonctions sera entièrement automatique, afin de mieux gérer les sécurités, sans intervention humaine. La commande se fera par un simple interrupteur sur l’émetteur.
-Le moteur sera électrique afin de mieux s’intégrer dans la chaîne de commande électronique.
-L’indexage de l’hélice se fera électroniquement et non mécaniquement, dans le but d’alléger la mécanique.
-Un interrupteur de puissance, indépendant de l’interrupteur de commande, sera actionné une fois le nez sorti. L’interrupteur de puissance est là uniquement en sécurité. Ce n’est pas lui qui démarre et arrête le moteur.
-Le nez (et le train) sera actionné par vérin pneumatique.
-Le moteur sera placé à l’avant du planeur (ce qui n’est pas le cas du réel), et les batteries, à l’arrière du train d’atterrissage.
Le choix du moteur se porte sur l’Ultra 3500-8 Graupner, qui est un moteur capable de développer plus de 1000 watts sous 32 volts. Ce moteur possède un manteau magnétique mobile permettant le calage automatique des pôles par rapport au collecteur, dans le but d’optimiser automatiquement le couple, suivant la charge du moteur.
A l’inverse des moteurs Brushless, les pôles magnétiques sont très marqués sur ce type de moteur. Lorsque le moteur est alimenté par un train de pulses soigneusement choisi, le moteur saute ses pôles magnétiques et tourne en « pas à pas » pour réaliser la recherche indexation de l’hélice.
Une fois le moteur choisi, le tableau de performances fourni avec le moteur, nous indique que la puissance désirée de 960 watts en entrée est atteinte à 8812 t/mn sous 32 volts. Les essais antérieurs d’hélices demandent une vitesse de rotation de 6000 t/mn. Le rapport de réduction sera donc de :
R1= 6000 / 8812 = 0,68
Cette valeur est théorique. Le rapport de réduction pratique donné par le rapport des dents des poulies dentées du réducteur sera :
R2 = 13 / 20 = 0,65
La mécanique est essentiellement constituée d’une boite à deux roulements, d’un réducteur à courroie crantée, d’un axe creux d’hélice, d’un axe de nez, passant dans l’axe d’hélice, et en appui sur deux bagues autolubrifiantes, d’un dispositif d’anti-rotation de l’axe de nez, à l’arrière de la boite à roulement, et d’un vérin pneumatique pour actionner l’axe de nez.
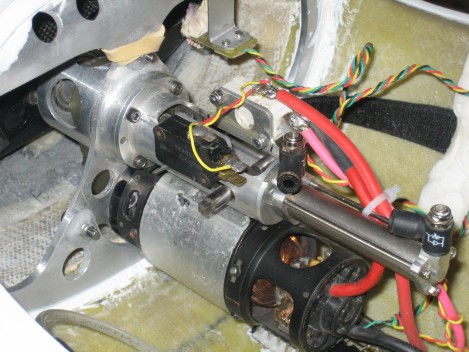
Cet ensemble mécanique supporte, les deux contacteurs électriques situés au niveau de l’antirotation de l’axe de nez, et les trois pattes de fixation du bloc propulsion au couple avant.
Le vérin de nez est de même conception que les vérins de train, mais comporte en plus, un dispositif anti-retour pour empêcher que le nez rentre par le vent relatif, dans le cas d’une fuite d’air du circuit pneumatique.